nanapome-rc さん




SK720 SBUS 接続 [ジャイロ]
E6-550 に送信機( R6303SB )を戻したので、ジャイロに繋ごうとしたのですが、以前の写真を見ただけだと何だか不安でマニュアルを確認しました。
SKOOKUM ROBOTICS のサイトの SK720 はブルーエディションのみで、SBUS 接続はアダプターが必要なタイプしか載っていません。付属の紙マニュアルは確か書いてあったと思いますが、探すのも面倒なので、ブルーエディションよりは新しい SK520 の方のマニュアルを確認しました。(こちらは SBUS コネクターで接続するタイプ)
IO-B でした。
以前、エルロンだか何かを誤接続してスワッシュが上手く動かなかった苦い経験があるので、良く確認してからフライトしたいと思います。
CGY750 リターン [ジャイロ]

ジャイロ戻ってきました。何を修理したかは書いてありませんでしたが....
部品代のところにケーブルとなっていたので、恐らく墜落した時にセンサー部分のケーブルと基盤か何かが接触不良になってたのかな、と想像します。
F450 で検証してみます。
今後も修理上がりを大型機に付けることは無いと思いますが。
今回、F450 に載っていたジャイロ(今は E8 に載っています)の設定のバックアップをとってあるので、それを戻して搭載します。基本的には設定無しで良かったと思います。
HeadResp の調整( CGY750 ) [ジャイロ]

今日は、Nさんから相談があり様子を見に行って来ました。
ヘッドのぶるぶる状態がホバリング時の回転を上げても収まらない様子。
機体は T-REX 700 LE (たぶん)に標準のサーボと CGY750 の組み合わせ。
CGY750 は Ver.1.2 でした。
エルロン、エレベーターとも HeadResp の値は 1 だったのでこれを 5 に変更。
フライトをしていただきましたが、ぶるぶるは出なくなったそうです。
HeadResp (ヘッドレスポンス) は、Expert 設定にあります。
ヘッドのダンパーゴムの硬さを擬似的にジャイロで表現したものということで、数値が小さめ(硬め)だと、ヘッドの操作レスポンスが素早くなる反面、サーボの追従性がそれに追いつかないと細かなハンチング様の症状がでます。
今回はわかりやすく大きめに値を増やしたので、フリップなどで操作がもたつくようだと値をハンチングしない程度に小さくしてもらうということで様子を見てもらうことにしました。
そういえば私のシルフィード EX も、ホバリング回転数が 1,400rpm だとハンチングするので 1,450rpm まで上げたのですが、 HeadResp は 1 にしてあるので、ここを変更した方が本来良いとは思います。
SK720 というジャイロ [ジャイロ]
JR の TAGS シリーズと同様にノーマルモードというものがありません。
FUTABA だと、ヘッドロックに入らないノーマルモードでトリムを合わせてからという流れになります。トリムのずれが大きいと、ヘッドロック( AVCS )モードに入れても傾きが出てしまいます。特に感度を高めにできる設定をしているとこの傾向は大きいように思います。
SK720 はトリムとか無しにいきなりフライトしても姿勢はまっすぐ維持してくれます。
細かい設定は無いので、静演技でピタリと止まる設定をしたい方には不向きなのかもしれませんが、楽と言えば楽です。
大型機( FORZA 700 )に搭載して背面練習やってみようかな....。
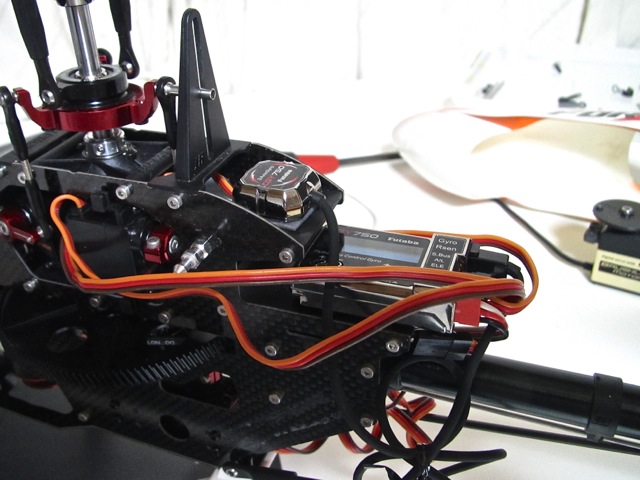
CGY750 設定完了 [ジャイロ]
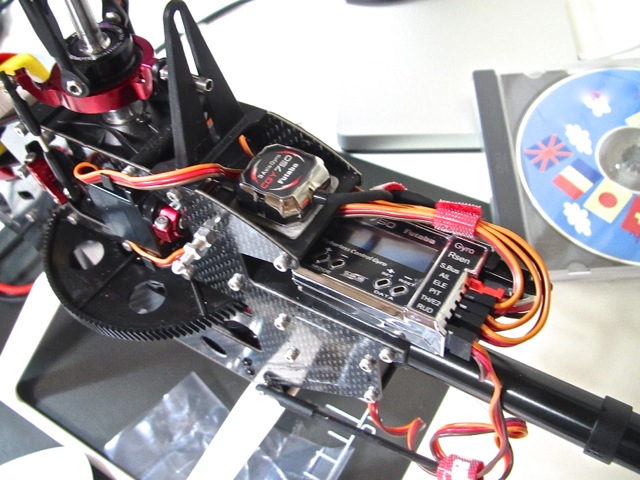
搭載と設定完了しました。設定はベースになった仮付けのジャイロの設定値を見て移すだけ。
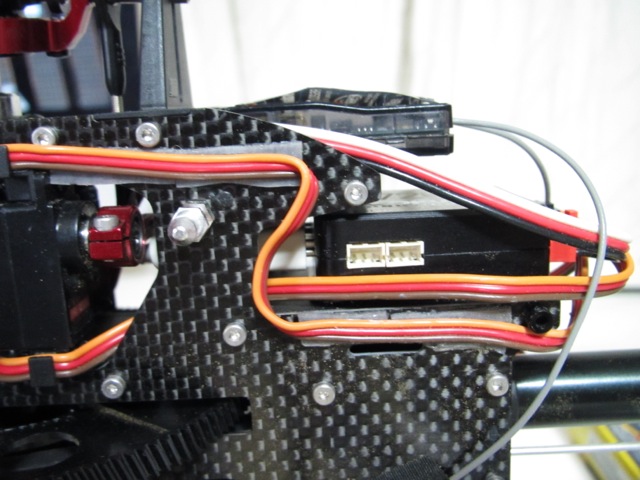
後々のセッティングを考えて MODE 、DATA スイッチはアクセスできるように配置。
受信機のみ側面に配置しました。
SK720 の時は、PCを接続しなくてはならない関係でセッティングはほったらかし(設定項目も感度くらいしかありませんでしたが)でしたが、上位機のように少しずつ設定を煮詰めながらいきたいと思います。
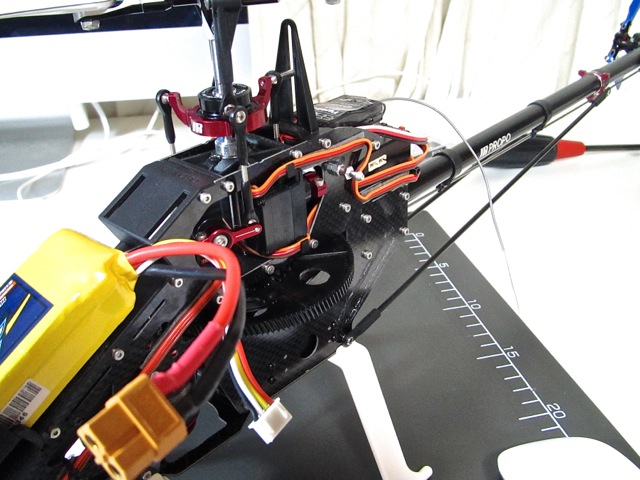
CGY750 に変更 [ジャイロ]
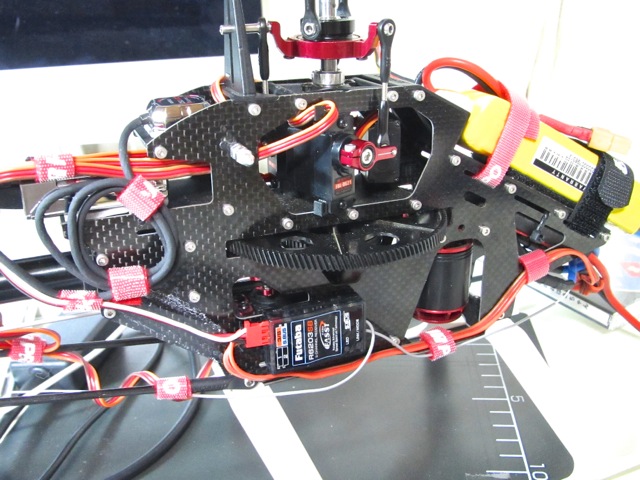
FORZA 450 は CGY750 に変更しました。
ちょっと不具合のある CGY750 を仮付けしておいて、設定後取り寄せた CGY750 にデータコピーをするつもりでした。
サーボのニュートラルは出ているので、設定は簡単でした。
乗せ換えからセッティングまで2時間くらい。
ところがデータコピーでつまづきました。
これで3時間。
接続用の CIU-2 が Win8 64bit ではそのまま動かない事を忘れていました。
また、GYLinkが正常に読み込みをしてくれません。
対応しているのが Windows7 までとなっているので、動かないのかもしれません。
結局、両方の画面見ながら設定値を移す事にしました。
とにかく PC につなげないといけない状態をなんとかして欲しいですね。
SK720 機能停止 [ジャイロ]

暑い盛りですが、同じ時間でも少し陰が長くなって、木陰の中で涼をとりながらフライトしてきました。
ジャイロの I.Gain を 40% から 60% にあげてみましたが、アイドルアップに入れた時にちょっと怖い挙動(ハンチング?)をしたので、元にもどしました。スタビィリティーゲイン( Stab.Gn )を下げた関係でジャイロゲイン(感度)はあげられるようになったので、I.Gain も大丈夫かなと思ったのですが、少しずつ確認すべきでした。

FORZA 450 の方は離陸して30cmくらいのところで、エルロン、エレベーター方向にハンチング(ぐらぐら)が発生。最終的にラダーを30%、エルロン、エレベーターを20%としましたが変わらず、フライトを断念しました。
これまで使ったジャイロの中で、墜落等が無い状態で壊れたジャイロは初めてです。
Update 4.0 が良くないのかとも思いましたが、セルフレベリングの挙動を見る限り、ジャイロ制御部分の故障とみるのが妥当かもしれません。
SK720 セルフレベリング停止 [ジャイロ]
今日もまた SK720 の設定です。コネクターがとても面倒なところにあるのでちょっと大変。
本日のフライトでセルフレベリングが変な補正(水平にしたらアップ気味に補正)をしたので、何度かダウンを打ちながら様子を見ていたら、そのうち補正をしてくれなくなりました。
そういえば以前、550 DFC に搭載していた時に補正が効かなくなったことがあってそのままでした。
フライト回数に比較して壊れるのが早いなあと思いながら、補正の無い状態と同じになったのでいつも通りフライト。
一応、セルフレベリングをオフにしておこうと思ったら、ファームウェアのバージョン 4.0 が出ていたので変更することにしました。
アップデートしたら設定は初期化...あれあれと思いましたが、サーボをアジャスタブルホーンで真ん中に調整してあるので、細かい調整は無しにほぼ復活。
受信機を SBUS 接続にしたので、ラダーのリミット調整ぐらい。
後はだいたい初期値に近いところでやっていたので、飛ばしてみて雰囲気が違いそうだったら変えます。
ファームウェアをバージョンアップしたら、AUX スイッチでセルフレベリングのオンオフができるようになったので一応それで切り替えることにしました。
最近なんとなく怪しいので、450クラス以上には搭載は無理かなと思っています。
SK720 セルフレベリングに [ジャイロ]

SK720 の設定は USB 接続なのでちょっと大変です。
FORZA 450 では、ケーブル接続側を後ろに配置したので、USB コネクターは機体の中側。
ピンセットで誘導しながらコネクターを接続しています。
それにしても、いつもわからないのは、コンディションの切り替えではセルフレベリングのオンオフはできないので AUX を割り当てようとするのですが、GEAR スイッチ固定になってしまうのです。
FUTABA の GEAR スイッチは通常 HOLD に割り当てますので、スイッチを変更したいのですが、ファンクション等で変更しても変わりません。
8FG の時はできていたのですがねえ。
セルフレベリングをオンにすると上空飛行で違和感があるのですが、上空行かないで背面に特化しておこと思います。
I.GAIN と D.GAIN その2【CGY750 V1.40】 [ジャイロ]

ジャイロは傾いた角度と時間の積に比例して舵を反対側に切ろうとします。
傾きがわずかで一瞬の間の場合は戻す力を弱く(切る舵を少なく)しますが、I.Gain というパラメタは、そのわずかな傾きの時でも戻す力を大きくします。当然ジャイロですから、反対側に傾いてしまわない一瞬の時間に大きめの舵を切ろうとするのではないかと思います。
そうすると、I.Gain を大きくするとハンチングが起きやすいものわかる気がします。
舵の追従性を上げるには、I.Gain の数値を下げて、ジャイロのゲイン(感度)を上げる方向かと。
逆にFBL機はまだ慣れていなくて、腕で機体姿勢の保持が難しい時は逆のパターンも場合によっては効果あるかもしれません。(慣れていない間は初期値が一番だと思いますが)

I.Gain は動き出すときの設定ですが、D.Gain の方は機体が止まるときの制御です。
機体を傾けた(舵を打った)後にスティックをニュートラルに戻すと、機体はその瞬間の姿勢を保持しようとします。慣性が働くので、ジャイロは少し舵の逆打ちをして機体をその瞬間の姿勢にとめようとします。
D.Gain というパラメタは、止める瞬間の舵の逆打ちの角度を大きめに補正する機能だと思われます。
これもハンチングを発生させやすいようです。
ヘッドの動きが俊敏でサーボの性能も良く、操縦系統がカチっと動くように設計されている機体はゲイン(感度)を下げずに、これら( I.Gain 、D.Gain )を上げられるのでピタっ、ピタっと良く止められるのでしょうね。