nanapome-rc さん




コードレスアンプ? [T-REX 550E DFC]
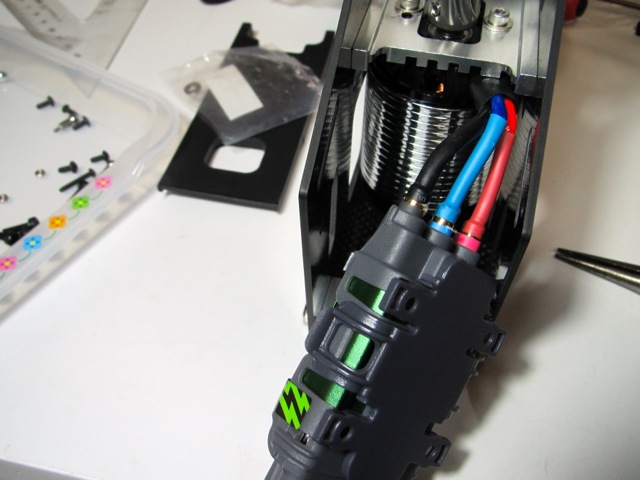
castle TALON 90 にはモーターへのコードが出ていません。
ソケットのみです。
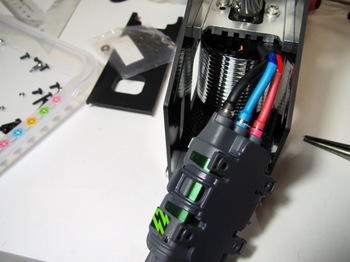
その関係で、搭載場所はバッテリー下のフロント部分に決まってしまいます。
墜落したら直撃しそうですね。
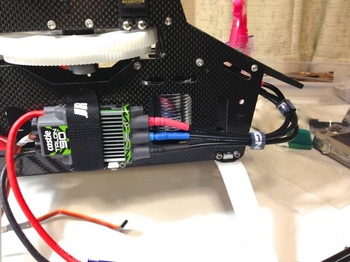
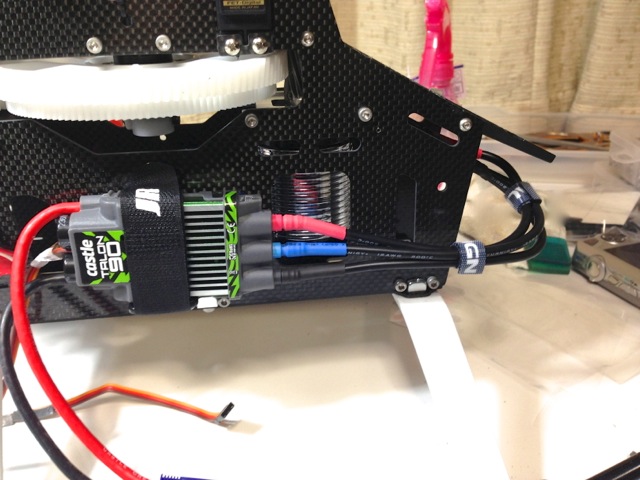
そこで、ちょっと効率悪くなりますがコードを追加して、アンプの位置を変えてみました。
受信機に影響があるといけないので、受信機はもう少し上に移動する予定です。
重心位置が合うかちょっと心配。
ソケットのみです。
その関係で、搭載場所はバッテリー下のフロント部分に決まってしまいます。
墜落したら直撃しそうですね。
そこで、ちょっと効率悪くなりますがコードを追加して、アンプの位置を変えてみました。
受信機に影響があるといけないので、受信機はもう少し上に移動する予定です。
重心位置が合うかちょっと心配。
2013-01-06 22:25
nice!(0)
コメント(12)
トラックバック(0)
Castle Talon 90 のプロポステックの調整の仕方わかりませんので教えていただけませんか?
宜しくお願いします。
by tatuhiro13 (2013-09-23 09:08)
T-REX 550E DFC に付属する Castle Talon 90 は未使用状態では以下のように初期設定されています。
■バッテリーカットオフ電圧
3.2V (バッテリーが空っぽにならないように5分程度のフライトにしましょう)
■ブレーキタイプ
ブレーキ無し(ヘリ用)
■低電圧時のモーターカットオフ
ゆっくり回転を落とす
■PWM レート
12kHz
通常、変更しなくてもフライトできます。
ただし、トラベルアジャスト(エンドポイント)を下は-120%くらいまで下げないとアーム(動作時の認識)しないようです。
また、上の方も+120%くらいまで上げないと最高回転にはならないようです。
送信機のスティックから変更できるのは上の4つで、BEC電圧は6.0V固定です。
全部書くと長ーくなるので、以下の記事を参考にしてみてください。
2010-11-07 12:14
PHOENIX ICE HV 120 送信機での設定
1.Cutoff voltage -> 3 3.2V
2.Brake Type -> 6 Brake Disabled
3.Low Voltage -> 2 Soft Cutoff
4.PWM Switching Rate -> 2 12kHz
の順番で良いと思います。
Castle Link を使って設定できる項目のうちで、ALIGN用にカスタムセッティングされているところは、マニュアル(CUSTUM ALIGN SETTING)に書かれています。
初動時の回転をもっと落としたい場合などは、Castle Link(パソコン)が必要です。
by nanapome-rc (2013-09-23 09:54)
キャスルリンクはカードはあるのですが、使用したことがありません。(知人から頂いたのですがコードがありません)
トラベルアジャスター下-120上+120で設定してみます。
有難う御座いました^^
by tatuhiro13 (2013-09-23 10:46)
T-REX 550E DFC を組立て飛ばしてみましたが、浮が悪くホバリングがやっとです。アンプのCastle Talon 90 はスティック調整以外はノーマルです。ピッチを変えたりしてみましたが、とてもこれで3Dが出来るのかと言う状態です。原因が分かりません。バッテーリーは、5000mA*40Cです。
よろしくお願いします。
by 407c (2014-09-09 01:11)
407c さん、こんばんは。
順番に確認をお願いできますでしょうか。
1.エンドポイント(又はトラベルアジャスト)、上の方は120%以上必要です。目いっぱいあげても2,300〜2,400rpmあたりだと聞いています。(友人がテレメトリーで確認)
黒いモーターのバージョンだと確かにあまり元気がありません。
(友人は3Dらしきものはやってました。)
スティック調整というのはキャリブレーションのことでしょうか?
2.アイドルアップは何%くらいの設定でしょうか。
100%にしても全然駄目でしょうか。
私の場合はかなり低めでしたが、75%くらでもループはできました。(それなりにおとなしめですが)
3.SPEC はアンプ以外は、
モーター:RCE-BL600MX 1200KV
バッテリー:5,000mAh 6S 22.2V 40C
ピニオンギヤ:11T
ということですね。
4.その他、標準と違うところは何かありますでしょうか?
by nanapome-rc (2014-09-09 18:51)
早速の返信有難うございます。
エンドポイントは最高の120%です。(このブログを参考にさせていただきました)
キャリブレーションは認識しているようです。
スーパーコンボを購入したのでご指摘の仕様です。
アイドルアップはいろいろ変更し100%まで上げましたが変化はありません。ピッチは+側11度です。標準と違うところは、ジャイロをフタバのCGY750に変更しています(下手くそなのでフタバのほうが安定が良いと聞いたもので)
バッテリーは新品を使用したためへたりは無いと思います。
キャッスルリンクは持っていないためアンプ設定はノーマルです。
by 407c (2014-09-10 01:15)
追伸
3GXはスロットルエンドポイントの設定が有るみたいなのですが、CGY750には無いのでしょうか
by 407c (2014-09-10 12:53)
407c さん、こんばんは。
スロットルのエンドポイントはありません。リミットはピッチのエンドポイントで調整するという考えの様です。
エルロン、エレベーターもエンドポイントはありませんが、それぞれを最大舵角にしたときに、ボディに干渉しないようスワッシュリングの設定があります。
by nanapome-rc (2014-09-10 18:37)
407c さん、アンプの件ですが、基本的なところは十分確認されているようで、私のこれまでの経験では思い浮かぶものがありません。
事例1
買って、最初にホバリングしたら1分くらいで必ずモーター停止。(HV120)
不良でメーカー修理で直りました。
事例2
2年くらい使った状態で急に回転が不安定になりだした。
(ホバリングでアイドルアップくらいの回転に)
修理せず使用停止。
事例3
上空で急にモーター停止、ちょくちょく停止するので使用をやめました。ログ機能でなぜか読み出せないので原因究明にいたりませんでした。
単純にアンプの不良ということもあるかもしれません。
私の場合は、キャッスルリンクをつないで、スロースタートの設定をしただけでした。
あとは、もう一度キャリブレーションをやり直してみることですが、エンドポイントを最初100%以内にしておいてやる方法もあります。
送信機の機種により違うのですが、エンドポイントを上下60〜80%にしておきます。
その状態で、スティックをHIにした状態でバッテリーを接続します。
すこしづつエンドポイントを上げて行って、アンプの音が100%あたりでしたら上はOKとします。
次にスティクをLOにして、エンドポイントを下げて行ってアンプの音が100%あたりでしたら下もOKとします。
これで、上は100%でスロットルハイに、下は0%でアームするようになると思います。
(このあたりは既にご存知かもしれませんが。)
by nanapome-rc (2014-09-10 19:32)
いろいろ有難うございます。
事例3の内容は色々やってみましたが変化は見られませんでした。
はずれアンプと言う事になりそうですね。
HOBBYWING PLATINUM 100A-V3 を購入付け替えて見ようと思います。
それと、キット付属の黒モーターは、今一なのでしょうか
エアウルフの600用ボディを付けたいのですが、このままでは飛びそうも有りません。
色々すいませんが、よろしくお願いします。
by 407c (2014-09-10 20:27)
黒のモーターは、上空ループなどは何も問題無くできるので、ボディーをつけるくらいのペイロードは大丈夫かと思います。
by nanapome-rc (2014-09-10 20:32)
アンプを交換してやって見ようと思います。
このブログは大変参考になるので何か有りましたら
また、よろしくお願いします。
by 407c (2014-09-10 20:49)